

| Version 1.1 (3D-printed frame) | Version 0 |
|
|
 Version 0 demo video: https://youtu.be/8GzzIQ3C6DQ.
Version 0 demo video: https://youtu.be/8GzzIQ3C6DQ.
 Usage in education (RoboCamp): https://youtu.be/Wd3yaorjTx0.
Usage in education (RoboCamp): https://youtu.be/Wd3yaorjTx0.
 See the [user builds gallery](docs/user.md):
See the [user builds gallery](docs/user.md):
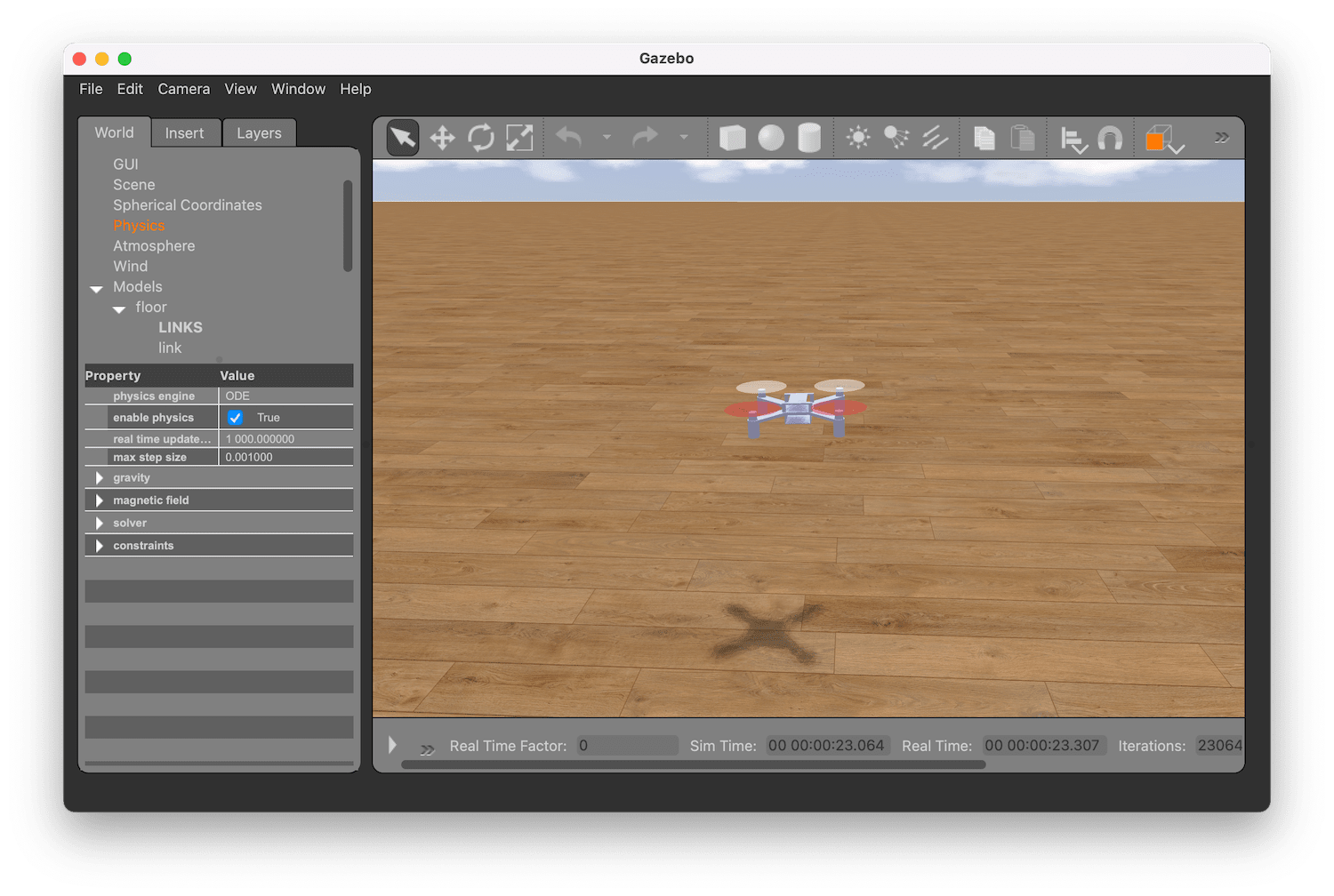
 ## Simulation
The simulator is implemented using Gazebo and runs the original Arduino code:
## Simulation
The simulator is implemented using Gazebo and runs the original Arduino code:
 ## Documentation
1. [Assembly instructions](docs/assembly.md).
2. [Usage: build, setup and flight](docs/usage.md).
3. [Simulation](gazebo/README.md).
4. [Python library](tools/pyflix/README.md).
Additional articles:
* [User builds gallery](docs/user.md).
* [Firmware architectural overview](docs/firmware.md).
* [Troubleshooting](docs/troubleshooting.md).
* [Log analysis](docs/log.md).
## Components
|Type|Part|Image|Quantity|
|-|-|:-:|:-:|
|Microcontroller board|ESP32 Mini|
## Documentation
1. [Assembly instructions](docs/assembly.md).
2. [Usage: build, setup and flight](docs/usage.md).
3. [Simulation](gazebo/README.md).
4. [Python library](tools/pyflix/README.md).
Additional articles:
* [User builds gallery](docs/user.md).
* [Firmware architectural overview](docs/firmware.md).
* [Troubleshooting](docs/troubleshooting.md).
* [Log analysis](docs/log.md).
## Components
|Type|Part|Image|Quantity|
|-|-|:-:|:-:|
|Microcontroller board|ESP32 Mini| |1|
|IMU (and barometer¹) board|GY‑91, MPU-9265 (or other MPU‑9250/MPU‑6500 board)
|1|
|IMU (and barometer¹) board|GY‑91, MPU-9265 (or other MPU‑9250/MPU‑6500 board)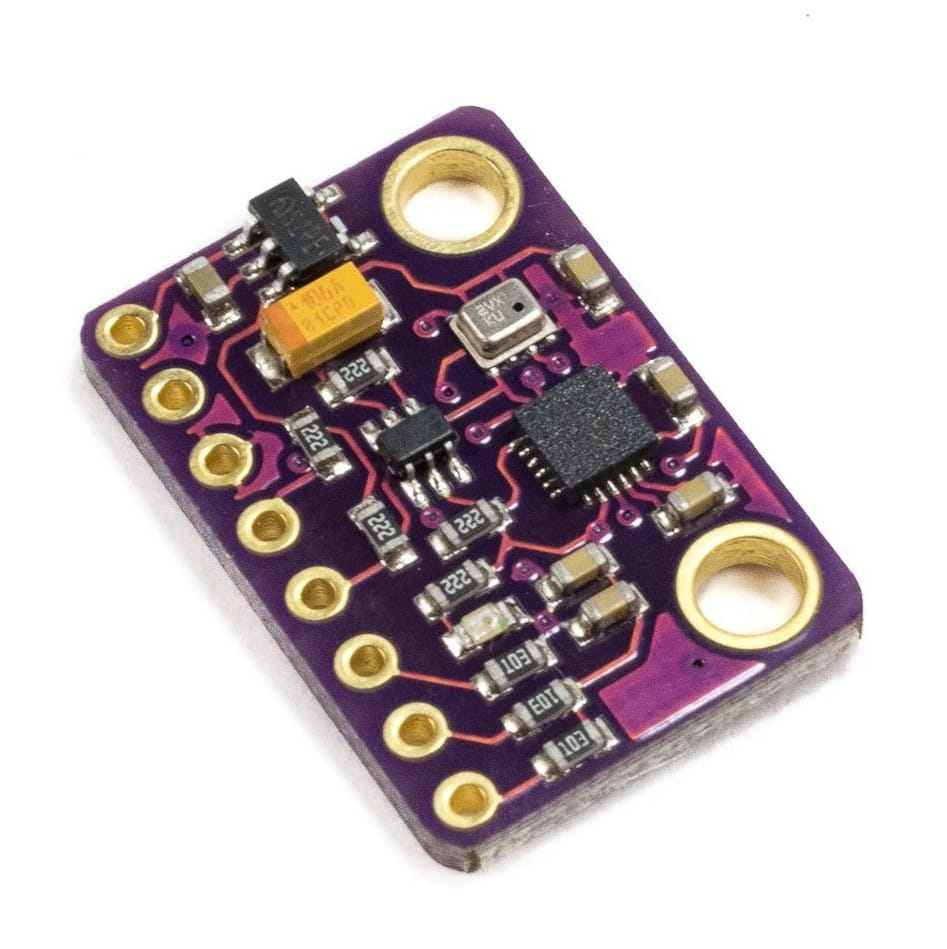
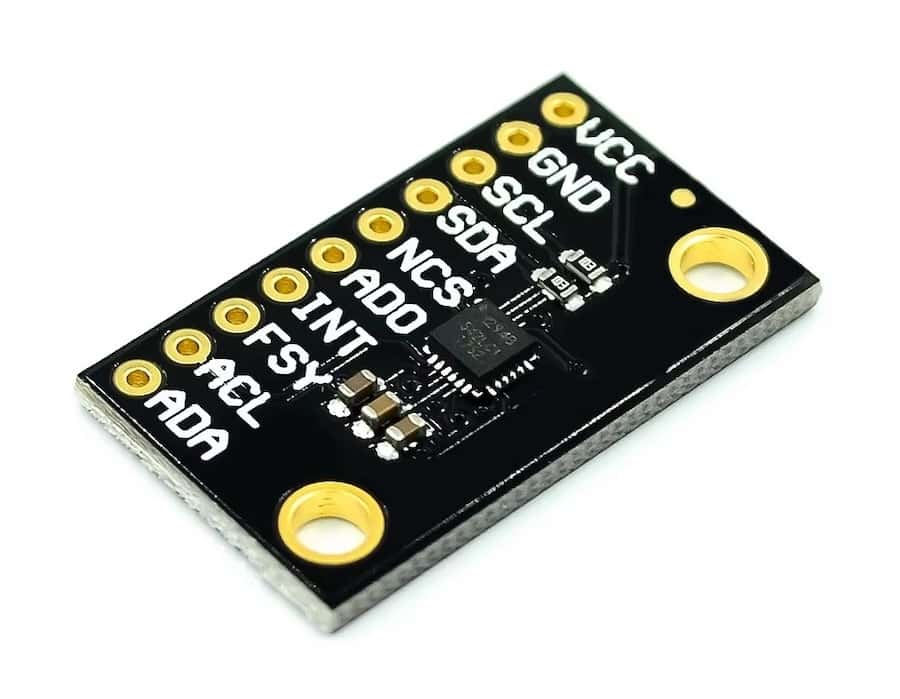
 |1|
|Boost converter (optional, for more stable power supply)|5V output|
|1|
|Boost converter (optional, for more stable power supply)|5V output|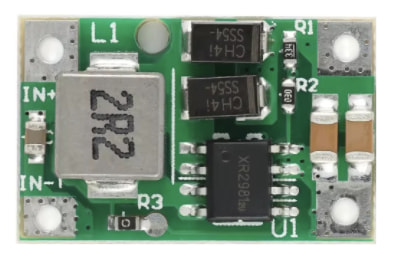 |1|
|Motor|8520 3.7V brushed motor.
|1|
|Motor|8520 3.7V brushed motor. |4|
|Propeller|55 mm (alternatively 65 mm)|
|4|
|Propeller|55 mm (alternatively 65 mm)| |4|
|MOSFET (transistor)|100N03A or [analog](https://t.me/opensourcequadcopter/33)|
|4|
|MOSFET (transistor)|100N03A or [analog](https://t.me/opensourcequadcopter/33)| |4|
|Pull-down resistor|10 kΩ|
|4|
|Pull-down resistor|10 kΩ| |4|
|3.7V Li-Po battery|LW 952540 (or any compatible by the size)|
|4|
|3.7V Li-Po battery|LW 952540 (or any compatible by the size)| |1|
|Battery connector cable|MX2.0 2P female|
|1|
|Battery connector cable|MX2.0 2P female| |1|
|Li-Po Battery charger|Any|
|1|
|Li-Po Battery charger|Any| |1|
|Screws for IMU board mounting|M3x5|
|1|
|Screws for IMU board mounting|M3x5| |2|
|Screws for frame assembly|M1.4x5|
|2|
|Screws for frame assembly|M1.4x5| |1|
|Frame top part|3D printed: [`stl`](docs/assets/esp32-holder.stl) [`step`](docs/assets/esp32-holder.step)|
|1|
|Frame top part|3D printed: [`stl`](docs/assets/esp32-holder.stl) [`step`](docs/assets/esp32-holder.step)| |1|
|Washer for IMU board mounting|3D printed: [`stl`](docs/assets/washer-m3.stl) [`step`](docs/assets/washer-m3.step)|
|1|
|Washer for IMU board mounting|3D printed: [`stl`](docs/assets/washer-m3.stl) [`step`](docs/assets/washer-m3.step)| |2|
|Controller (recommended)|CC2500 transmitter, like BetaFPV LiteRadio CC2500 (RC receiver/Wi-Fi).
|2|
|Controller (recommended)|CC2500 transmitter, like BetaFPV LiteRadio CC2500 (RC receiver/Wi-Fi).
 |1|
|*RC receiver (optional)*|*DF500 or other³*|
|1|
|*RC receiver (optional)*|*DF500 or other³*| |1|
|Wires|28 AWG recommended|
|1|
|Wires|28 AWG recommended| ||
|Tape, double-sided tape||||
*¹ — barometer is not used for now.*
||
|Tape, double-sided tape||||
*¹ — barometer is not used for now.* *(Dashed elements are optional).*
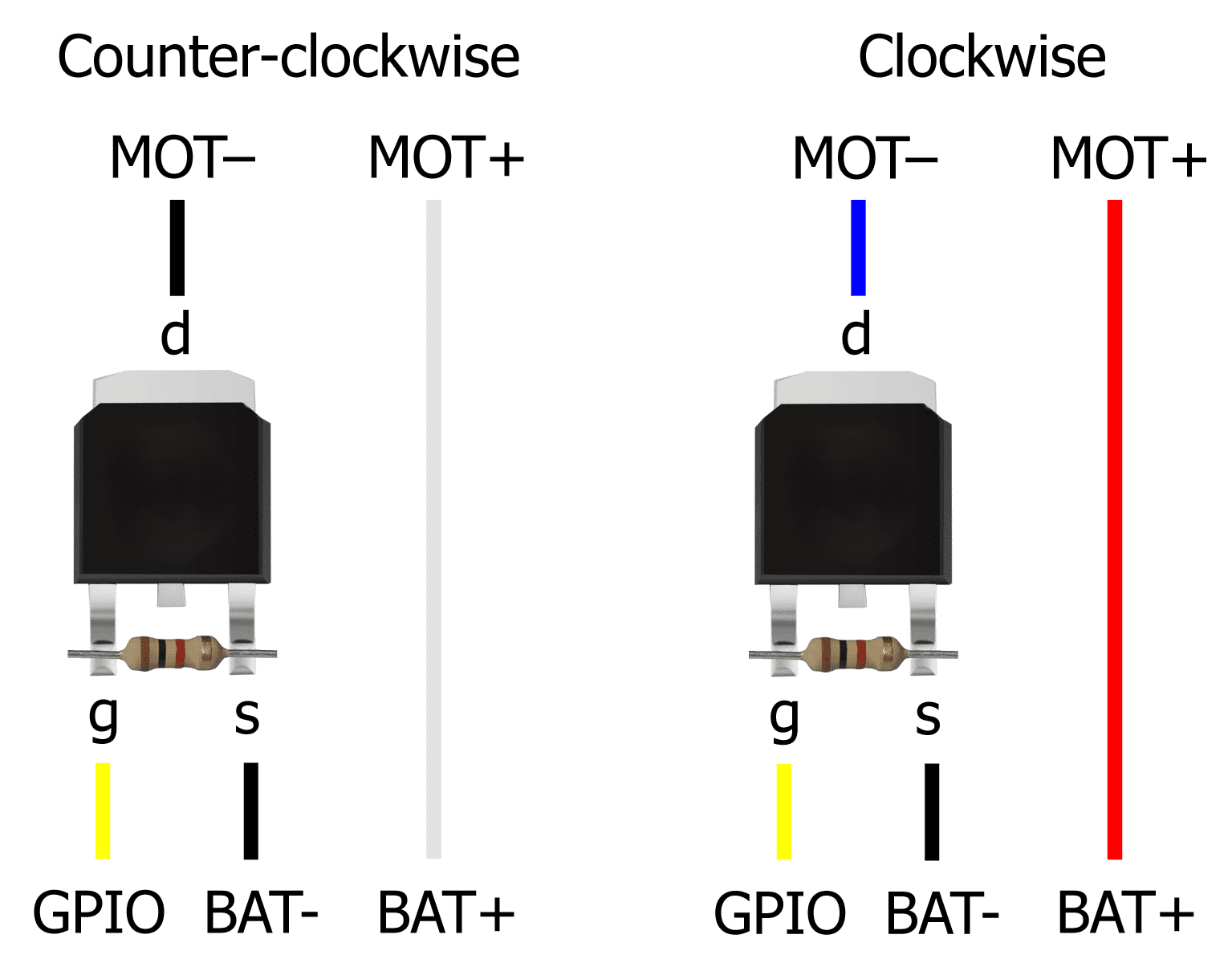
Motor connection scheme:
*(Dashed elements are optional).*
Motor connection scheme:
 You can see a user-contributed [variant of complete circuit diagram](https://miro.com/app/board/uXjVN-dTjoo=/?moveToWidget=3458764612338222067&cot=14) of the drone.
### Notes
* Power ESP32 Mini with Li-Po battery using VCC (+) and GND (-) pins.
* Connect the IMU board to the ESP32 Mini using VSPI, power it using 3.3V and GND pins:
|IMU pin|ESP32 pin|
|-|-|
|GND|GND|
|3.3V|3.3V|
|SCL *(SCK)*|SVP (GPIO18)|
|SDA *(MOSI)*|GPIO23|
|SAO *(MISO)*|GPIO19|
|NCS|GPIO5|
* Solder pull-down resistors to the MOSFETs.
* Connect the motors to the ESP32 Mini using MOSFETs, by following scheme:
|Motor|Position|Direction|Prop type|Motor wires|GPIO|
|-|-|-|-|-|-|
|Motor 0|Rear left|Counter-clockwise|B|Black & White|GPIO12 (*TDI*)|
|Motor 1|Rear right|Clockwise|A|Blue & Red|GPIO13 (*TCK*)|
|Motor 2|Front right|Counter-clockwise|B|Black & White|GPIO14 (*TMS*)|
|Motor 3|Front left|Clockwise|A|Blue & Red|GPIO15 (*TD0*)|
Clockwise motors have blue & red wires and correspond to propeller type A (marked on the propeller).
Counter-clockwise motors have black & white wires correspond to propeller type B.
* Optionally connect the RC receiver to the ESP32's UART2:
|Receiver pin|ESP32 pin|
|-|-|
|GND|GND|
|VIN|VCC (or 3.3V depending on the receiver)|
|Signal (TX)|GPIO4¹|
*¹ — UART2 RX pin was [changed](https://docs.espressif.com/projects/arduino-esp32/en/latest/migration_guides/2.x_to_3.0.html#id14) to GPIO4 in Arduino ESP32 core 3.0.*
## Resources
* Telegram channel on developing the drone and the flight controller (in Russian): https://t.me/opensourcequadcopter.
* Official Telegram chat: https://t.me/opensourcequadcopterchat.
* Detailed article on Habr.com about the development of the drone (in Russian): https://habr.com/ru/articles/814127/.
## Disclaimer
This is a DIY project, and I hope you find it interesting and useful. However, it's not easy to assemble and set up, and it's provided "as is" without any warranties. There's no guarantee that it will work perfectly, or even work at all.
⚠️ The author is not responsible for any damage, injury, or loss resulting from the use of this project. Use at your own risk!
You can see a user-contributed [variant of complete circuit diagram](https://miro.com/app/board/uXjVN-dTjoo=/?moveToWidget=3458764612338222067&cot=14) of the drone.
### Notes
* Power ESP32 Mini with Li-Po battery using VCC (+) and GND (-) pins.
* Connect the IMU board to the ESP32 Mini using VSPI, power it using 3.3V and GND pins:
|IMU pin|ESP32 pin|
|-|-|
|GND|GND|
|3.3V|3.3V|
|SCL *(SCK)*|SVP (GPIO18)|
|SDA *(MOSI)*|GPIO23|
|SAO *(MISO)*|GPIO19|
|NCS|GPIO5|
* Solder pull-down resistors to the MOSFETs.
* Connect the motors to the ESP32 Mini using MOSFETs, by following scheme:
|Motor|Position|Direction|Prop type|Motor wires|GPIO|
|-|-|-|-|-|-|
|Motor 0|Rear left|Counter-clockwise|B|Black & White|GPIO12 (*TDI*)|
|Motor 1|Rear right|Clockwise|A|Blue & Red|GPIO13 (*TCK*)|
|Motor 2|Front right|Counter-clockwise|B|Black & White|GPIO14 (*TMS*)|
|Motor 3|Front left|Clockwise|A|Blue & Red|GPIO15 (*TD0*)|
Clockwise motors have blue & red wires and correspond to propeller type A (marked on the propeller).
Counter-clockwise motors have black & white wires correspond to propeller type B.
* Optionally connect the RC receiver to the ESP32's UART2:
|Receiver pin|ESP32 pin|
|-|-|
|GND|GND|
|VIN|VCC (or 3.3V depending on the receiver)|
|Signal (TX)|GPIO4¹|
*¹ — UART2 RX pin was [changed](https://docs.espressif.com/projects/arduino-esp32/en/latest/migration_guides/2.x_to_3.0.html#id14) to GPIO4 in Arduino ESP32 core 3.0.*
## Resources
* Telegram channel on developing the drone and the flight controller (in Russian): https://t.me/opensourcequadcopter.
* Official Telegram chat: https://t.me/opensourcequadcopterchat.
* Detailed article on Habr.com about the development of the drone (in Russian): https://habr.com/ru/articles/814127/.
## Disclaimer
This is a DIY project, and I hope you find it interesting and useful. However, it's not easy to assemble and set up, and it's provided "as is" without any warranties. There's no guarantee that it will work perfectly, or even work at all.
⚠️ The author is not responsible for any damage, injury, or loss resulting from the use of this project. Use at your own risk!