# flix
**flix** (*flight + X*) — making an open source ESP32-based quadcopter from scratch.
 ## Features
* Simple and clear Arduino based source code.
* Acro and Stabilized flight using remote control.
* Precise simulation using Gazebo.
* In-RAM logging.
* Command line interface through USB port.
* Wi-Fi support.
* ESCs with reverse mode support.
* *Textbook and videos for students on writing a flight controller\*.*
* *MAVLink support\*.*
* *Completely 3D-printed frame*.*
* *Position control and autonomous flights using external camera\**.
* [Building and running instructions](docs/build.md).
*\* — planned.*
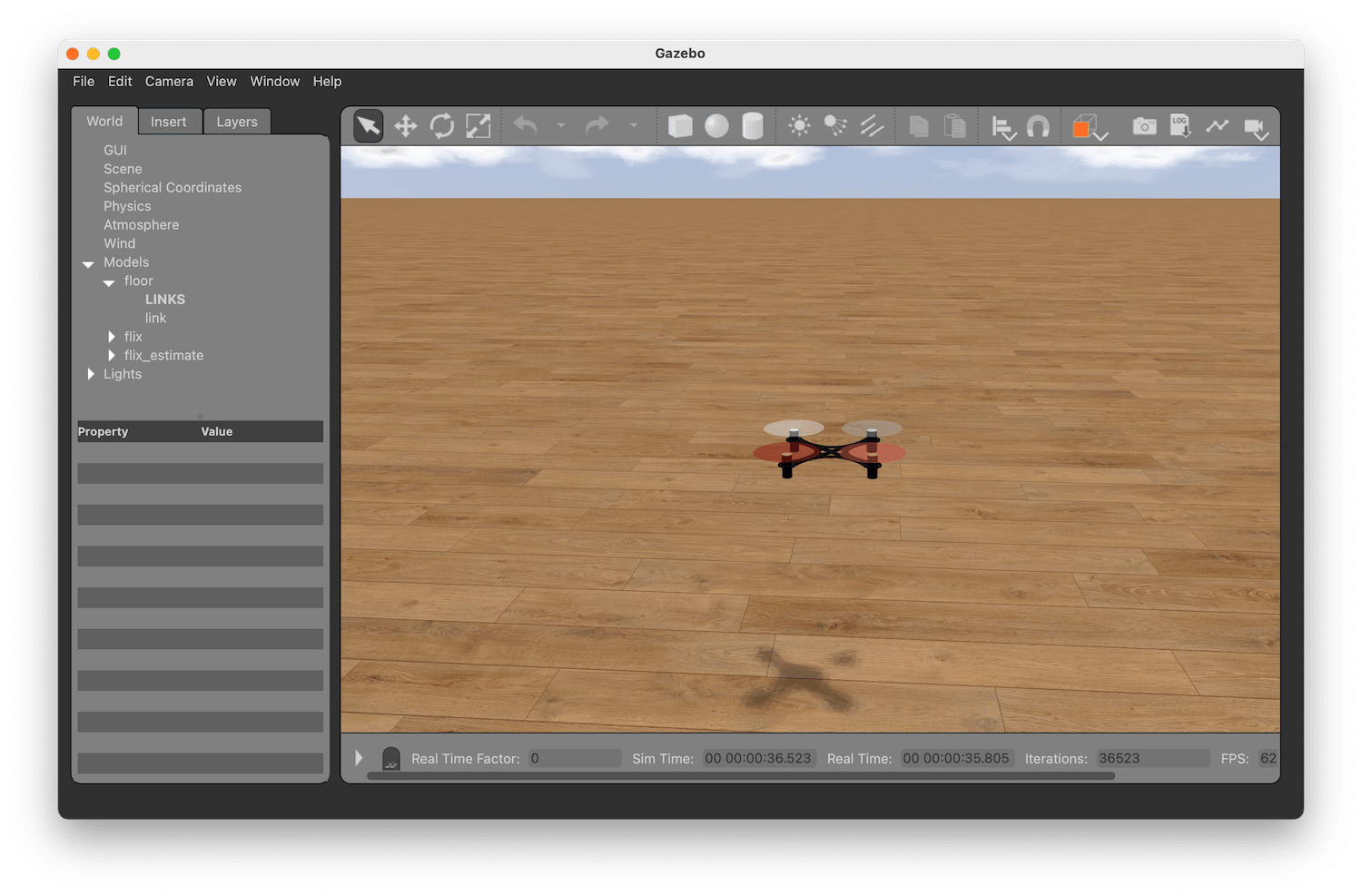
## Simulation
Simulation in Gazebo using a plugin that runs original Arduino code is implemented:
## Features
* Simple and clear Arduino based source code.
* Acro and Stabilized flight using remote control.
* Precise simulation using Gazebo.
* In-RAM logging.
* Command line interface through USB port.
* Wi-Fi support.
* ESCs with reverse mode support.
* *Textbook and videos for students on writing a flight controller\*.*
* *MAVLink support\*.*
* *Completely 3D-printed frame*.*
* *Position control and autonomous flights using external camera\**.
* [Building and running instructions](docs/build.md).
*\* — planned.*
## Simulation
Simulation in Gazebo using a plugin that runs original Arduino code is implemented:
 ## Schematics
## Schematics
 ## Version 0
### Components
|Component|Type|Image|Quantity|
|-|-|-|-|
|ESP32 Mini|Microcontroller board|
## Version 0
### Components
|Component|Type|Image|Quantity|
|-|-|-|-|
|ESP32 Mini|Microcontroller board| |1|
|GY-91|IMU+LDO+barometer board|
|1|
|GY-91|IMU+LDO+barometer board|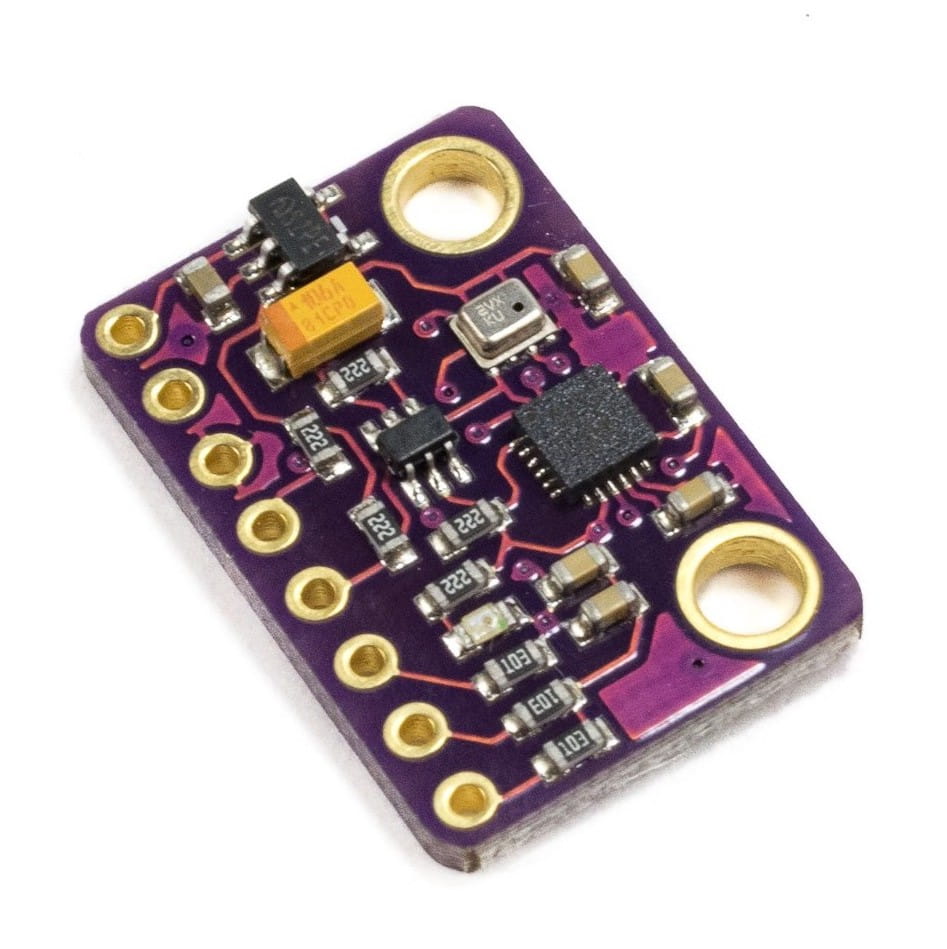 |1|
|K100|Quadcopter frame|
|1|
|K100|Quadcopter frame|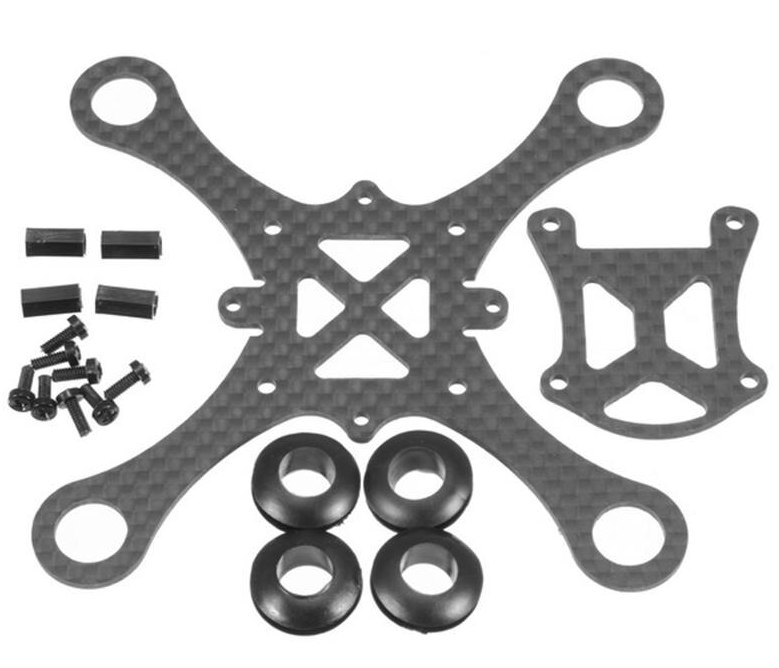 |1|
|8520 3.7V brushed motor|Motor|
|1|
|8520 3.7V brushed motor|Motor| |4|
|Hubsan 55 mm| Propeller|
|4|
|Hubsan 55 mm| Propeller| |4|
|2.7A 1S Dual Way Micro Brush ESC|Motor ESC|
|4|
|2.7A 1S Dual Way Micro Brush ESC|Motor ESC|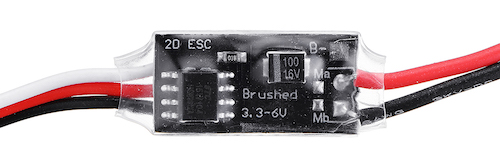 |4|
|KINGKONG TINY X8|RC transmitter|
|4|
|KINGKONG TINY X8|RC transmitter| |1|
|DF500 (SBUS)|RC receiver|
|1|
|DF500 (SBUS)|RC receiver| |1|
||SBUS inverter|
|1|
||SBUS inverter| |1|
|3.7 Li-Po 850 MaH 60C|Battery|||
||Battery charger|
|1|
|3.7 Li-Po 850 MaH 60C|Battery|||
||Battery charger| |1|
||Wires, connectors, tape, ...||
||3D-printed frame parts||
|1|
||Wires, connectors, tape, ...||
||3D-printed frame parts||